ICLR 2026
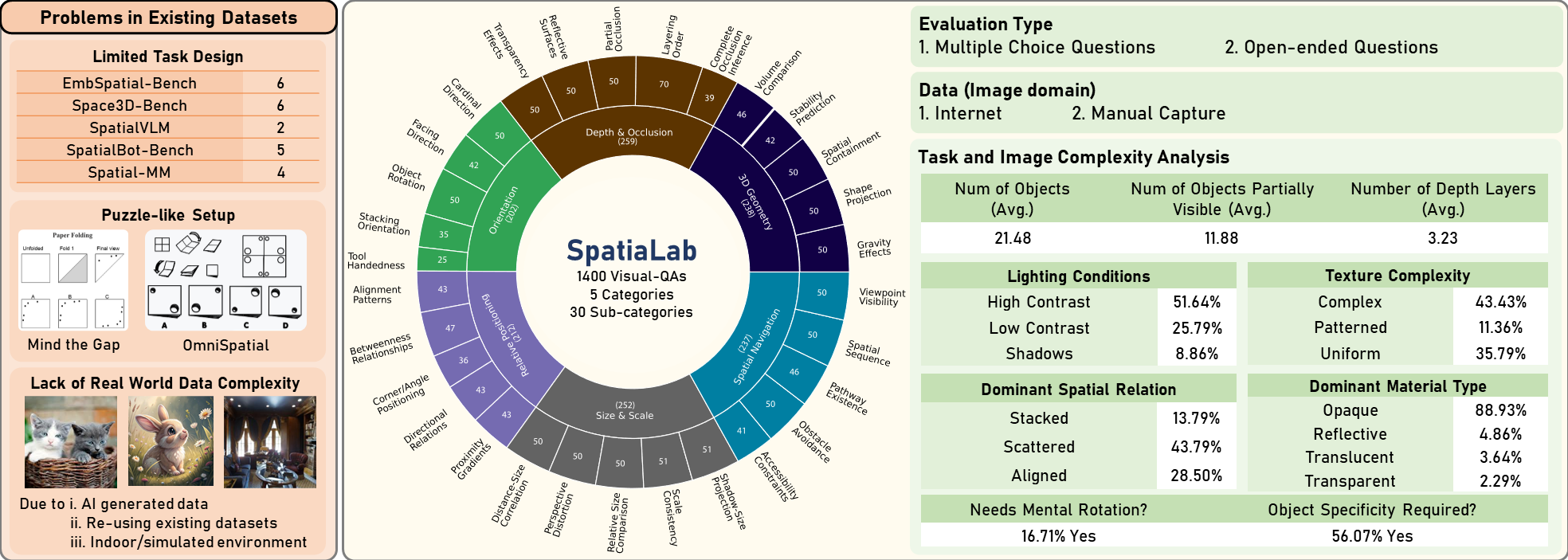
1,400 visual QA pairs
6 categories • 30 subcategories
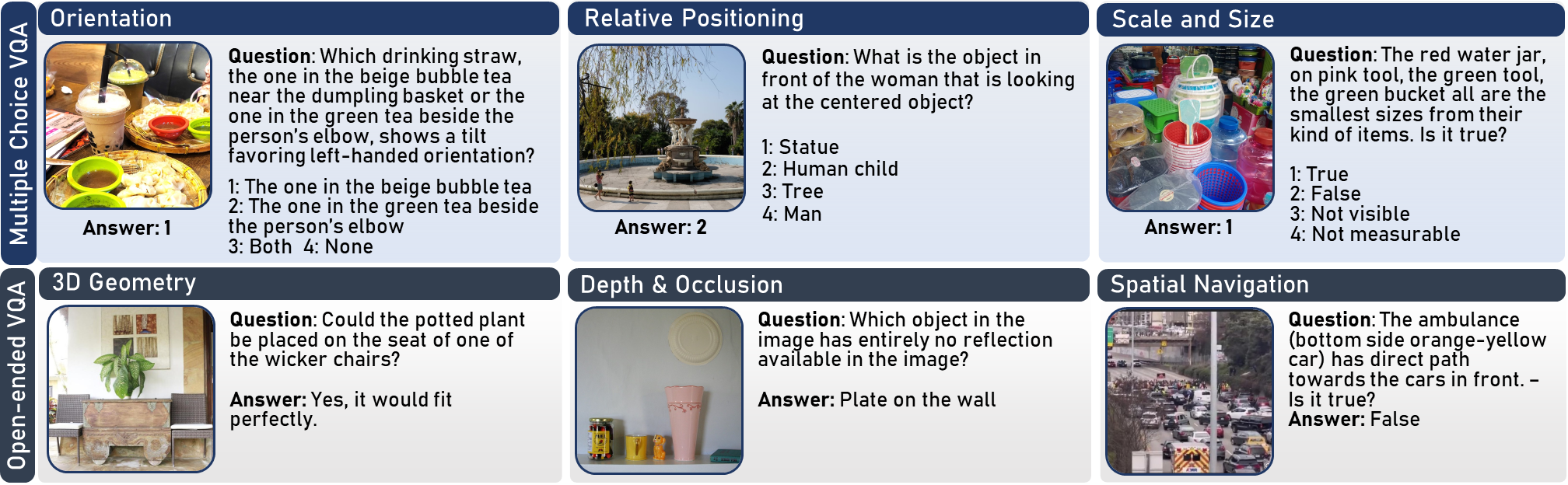
MCQ + Open-ended
SpatiaLab: Can Vision–Language Models Perform Spatial Reasoning in the Wild?
Computational Intelligence and Operations Laboratory (CIOL) • Shahjalal University of Science and Technology (SUST) • Monash University • Qatar Computing Research Institute (QCRI)
Correspondence: azminetoushik.wasi@gmail.com
Accepted to The Fourteenth International Conference on Learning Representations (ICLR 2026)
📄 OpenReview 📄 arXiv 🤗 Hugging Face 🤗 HF (Paper) Kaggle GitHub